En décembre 2010 , j'ai reçu un message de l'ami Foxtrot :
"Bonjour Jean-Pierre,
J'ai un projet. Il faut que je t'en parle car je crois que tu pourras me donner conseil.
Je suis amateur de HIFI à tubes.
Je voudrais numériser ma bobineuse de transfo, d'alim et de sortie.
Le principal, 2 PAP, un pour enrouler et l'autre pour guider le fil, suivant son diamètre. Donc, 2 vitesses différentes. A ça, il faudrait ajouter quelque commandes, comme vitesse, contrôle à la main etc... "
La question étant simple, j'ai relevé le défi, dialogué avec Foxtrot et conçu l'électronique d'une bobineuse automatique : la "Foxtrot's coil winder".
On a passé des soirés à définir le cahier des charges de la machine de ses rêves, puis finalement c'est Daniel Morange qui a fait la première mécanique. Une vraie oeuvre d'art, tout simplement
La réalisation
Le concept est, dans son principe, très simple :
Une carte pilote deux drivers de moteurs pas à pas. la carte est connectée à un PC par port USB
Un moteur pas à pas sert à faire tourner la bobine réceptrice
Le deuxième moteur pas à pas entraine le guide fil et est synchronisé avec la vitesse d'enroulement de la bobine
Une pédale permet de commander la vitesse
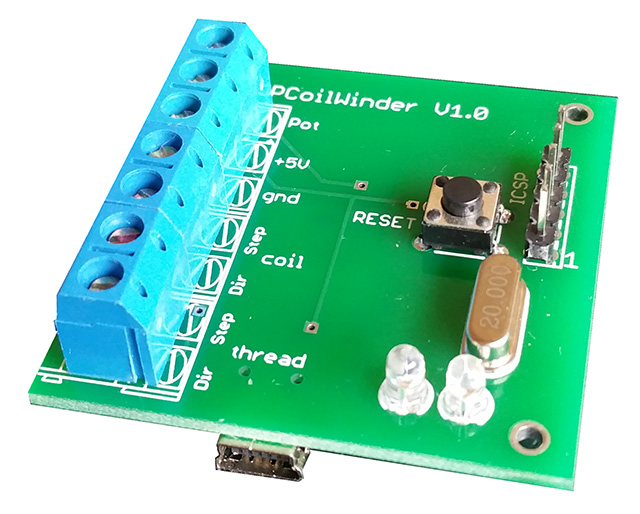
La carte existe ausi en version "Pro" :
Une carte double face
compacte
les composants SMD
sérigraphiée
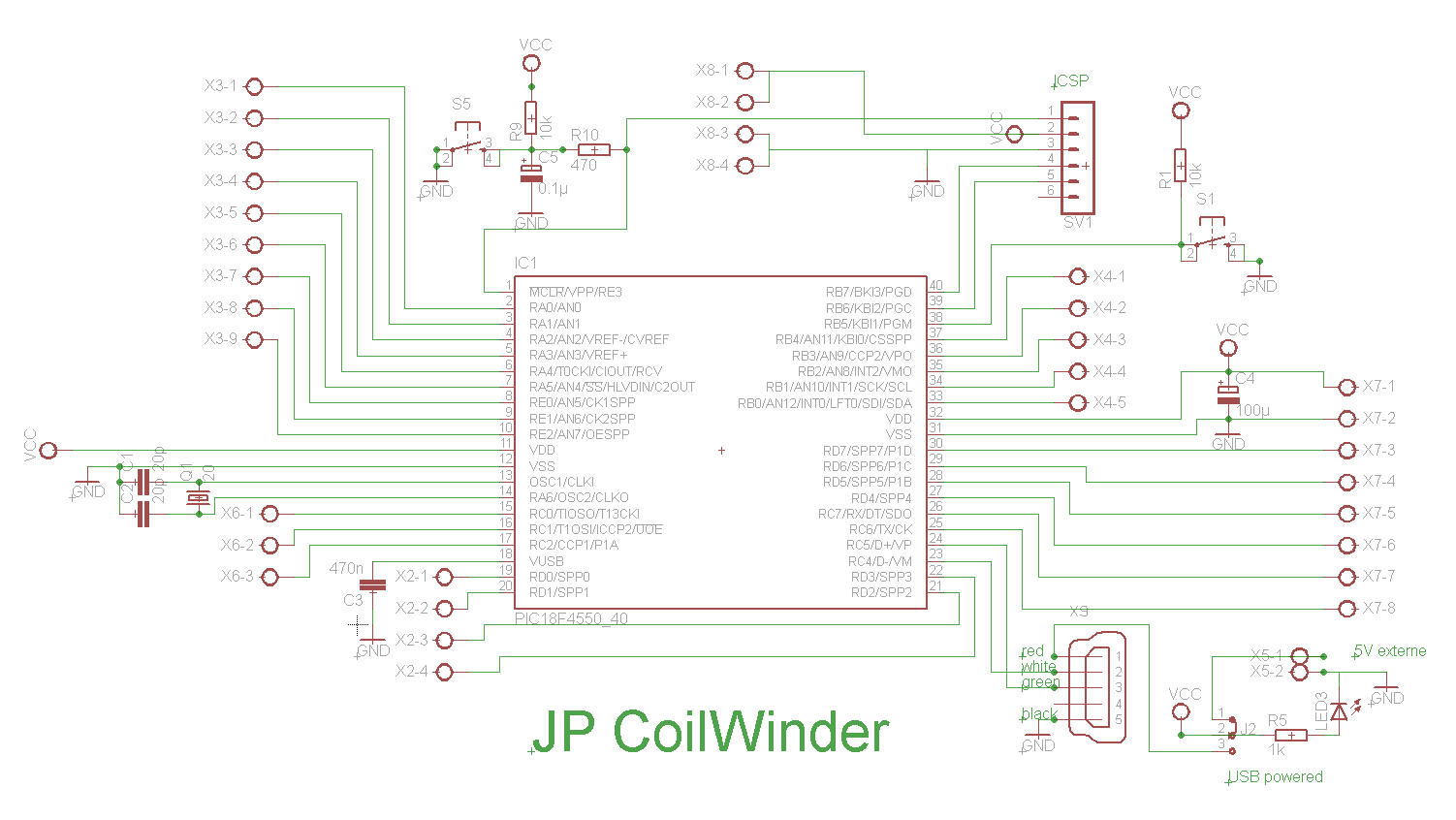
Schéma de la carte (cliquez sur le schéma pour zoomer)
La carte est conçue autour d'un PIC18F4550. Le schéma est minimaliste, la plupart des connecteurs sont mis pour pouvoir s'en servir pour "autre chose"
Seules 4 sorties digitales sont utilisées pour commander les moteurs par les classiques signaux "Step" et "Dir" de tout bon driver de moteur PAP.
Une entrée analogique sert à connecter un potentiomètre pour la pédale.
Le logiciel est le cerveau de la carte il permet de faire des choses assez sophistiquées et d'autres plus simples :
Le plus difficile est d'asservir la vitesse du guide fil avec celle de la bobine
cet asservissement est commandable par une pédale ou fonctionne en automatique,
le guide fil doit "freiner" avant en arrivant sur la buté et repartir doucement dans l'autre sens
Foxtrot m'a aussi (gentiment) demandé :
de prévoir des arrêts toutes les N couches pour pouvoir mettre des isolants entre les couches,
des fins de course (sécurité),
de pouvoir régler la position du guide fil,
de sauvegarder/restaurer des contextes et des projets
de"répartir" harmonieusement les dernières spires sur toute la largeur de la bobine.
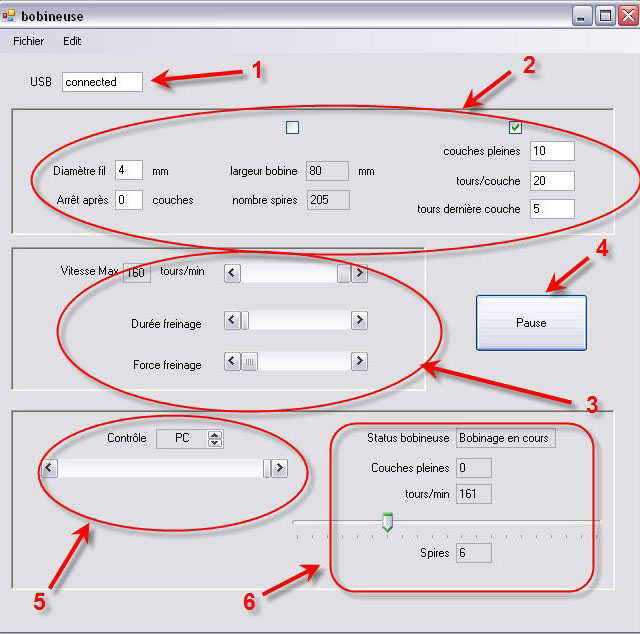
L'IHM PC a donc les fonctionalités suivantes :
1) état de la connexion USB
2) saisie des paramètres de la bobine
3) réglage des vitesses max des moteurs et des rampes d'accélération/freinage
4) démarrage/Pause du bobinage
5) potentiomètre de commande de bobinage (ou curseur sur l'IHM)
6) affichage temps réel de l'état de la bobineuse
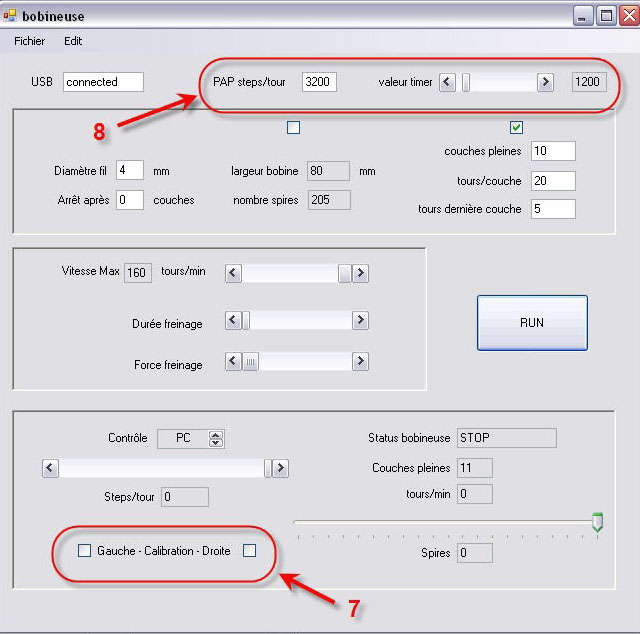
et encore deux compléments sont accessibles par le menu
7) calibration de la position du guide fil
8) paramètres avancés du moteur




 puis passez en plein écran
puis passez en plein écran 